The engineering group is composed of students working on the Electrical, Mechnanical and Software engineering aspects of the project. They are responsible for designing and building the engineering components that the vehicle will make use of.
Objectives
- Design and construct the electrical, software and mechanical components of our vehicle.
- Use the best materials we can afford to ensure a strong, resilient yet light frame.
- Integrate a MCU based control system that constantly monitors multiple sensors and optimizes driving parameters in real-time.
- Write software to perform vehicle speed and stability simulations to help optimize our mechanical design.
Control System
At the heart of our control system is a high-speed microcontroller that is responsible for both driving the motors and monitoring an array of temperature, speed and IMU sensors. Lucas Ruebsamen is leading the software and electrical engineering team to design custom C++ software written to manage the information from the sensors and driver’s inputs in order to keep the motors in their most optimal range of operation.

The 3-wheeled vehicle will have two front drive wheels that are controlled via a microcontroller that takes input from the driver and sends a PWM signal to power each motor independently. Feedback from the wheel will be analyzed hundreds of times per second to allow the computer to adjust the speed of the wheel to optmize for the steering input of the driver.
C++ Software
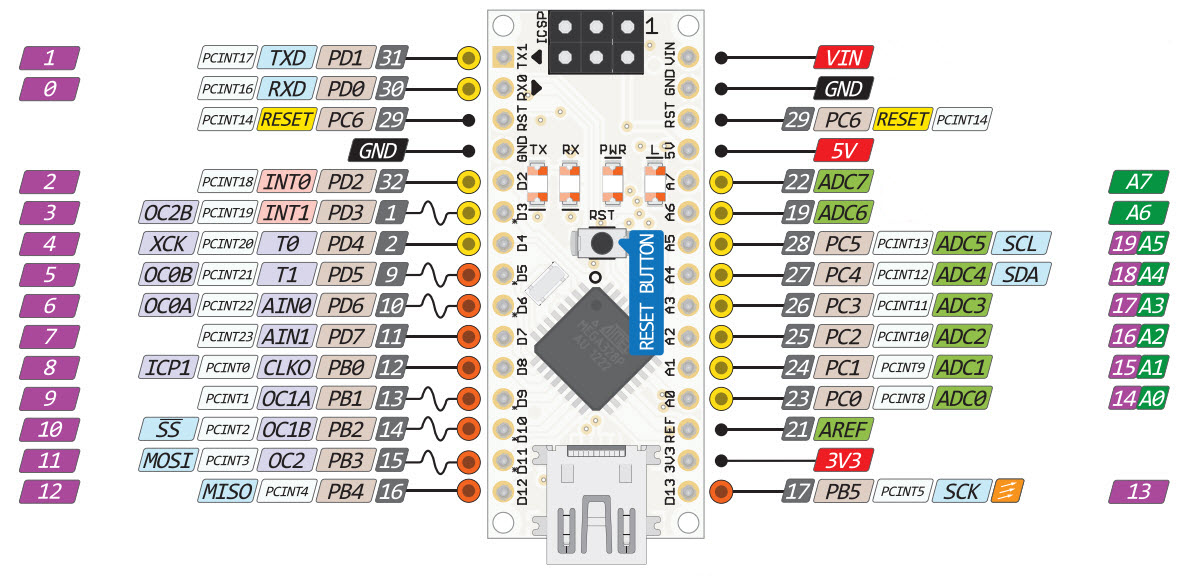
The software is written in C++ using the Arduino Framework and runs on the Atmega 328 Microcontroller that is the heart of the control system. Every 250ms, sensor (throttle, steering, speed, acceleration, etc) data is fed into the microcontroller and the software makes decisions on what the best throttle response is to optimize efficiency and safety based upon the parameters passed in.
Frame Design
The custom frame is hand assembeled and welded aluminum. Kirin Kunkle is leading the mechanical engineering team responsible for assembling the frame and mechanical components of the vehicle. The shell team is being led by Dylan Zazueta.
Microcontroller optimized vehicle
The Atmel microcontroller will perform a very important function in our vehicle and is primarily responsible for optimizing both the throttle and steering response.
- Temperature and Speed sensors on the motors will allow the software to be written to optimize performance.
- Sensors to measure the steering angle will allow the microcontroller to act like a “software differential” when steering to further optimize performance and efficiency.
- Throttle response will be software controlled and a ‘drive-by-wire’ system will attempt to keep the motors operating at their peak effiencies.
- A 3-Axis Gyro and Accelerometer will allow the microcontroller to monitor performance characteristics so that we can download and analyze them.

